

新闻动态
[时间:2018-10-23 10:55:10] [点击:1766] [分类:新闻中心]
压路机的行走系统为静液压闭式系统,行驶速度v与行驶马达转速传感器信号的关系为:
式中:R为测速钢轮半径,m;P为马达转速信号频率,个/s;N为马达测速盘齿数,个/r;i2为减速器减速比。
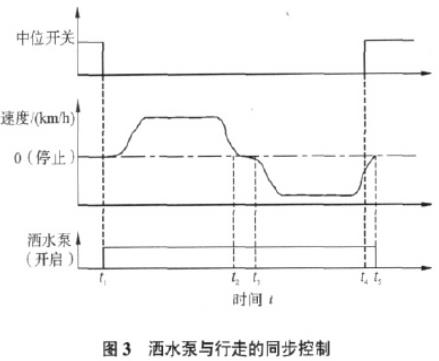
图3所示为洒水泵与行走的同步控制过程,t1是压路机准备起步时刻,此时压路机钢轮的速度尚未建立,钢轮上没有水,需要提前洒水,以防起步时就有沥青黏结,因此在t1时刻,洒水开始启动。
同时用行驶速度加以校正,如果中位信号消失一段时间后仍没有速度,则停止洒水,避免由于开关失灵误洒水而造成浪费。
t2~t3为压路机换向行驶时间段,这段时间无中位开关信号,且行驶速度在由正向变为反向,控制洒水泵启停的电流控制洒水不被中断。
t4是压路机准备停车时,首先检测到中位信号,经过Δt=t5-t4时间段后,行驶速度变为零,两个特征同时满足则洒水泵停止洒水。








版权所有©山东唯佳机械有限公司 销售:0533-4820062 0533-4824000 电话:0533-4822333 0533-4821000
友情提示:只有www.shandongweijia.com网站对外展示内容真实有效,其余网站展示内容与本公司无关
友情提示:只有www.shandongweijia.com网站对外展示内容真实有效,其余网站展示内容与本公司无关
备案号:鲁ICP备12002285号-1